Potential Functions
Dijkstra breaks on negative edges. Bellman-Ford handles them but costs \(O(VE)\). What if you could transform negative edges into non-negative ones, run Dijkstra, then undo the transformation? That's exactly what a potential function does. It's the algebraic trick behind Johnson's algorithm — and it solves a class of "maximize gain" problems that look nothing like shortest paths.
The Problem with Negative Edges
Dijkstra's greedy invariant: when you pop a node, its distance is final. This relies on all edge weights being non-negative. If an edge has weight \(-5\), a longer path through an unprocessed node might actually be shorter. The greedy choice fails.
Bellman-Ford fixes this by relaxing all edges \(V-1\) times. But that's \(O(VE)\) — too slow for large graphs.
💡 Key insight. A potential function shifts all edge weights up so they're non-negative, without changing which path is shortest. It's not a hack — it's a mathematically rigorous reweighting that preserves shortest-path structure.
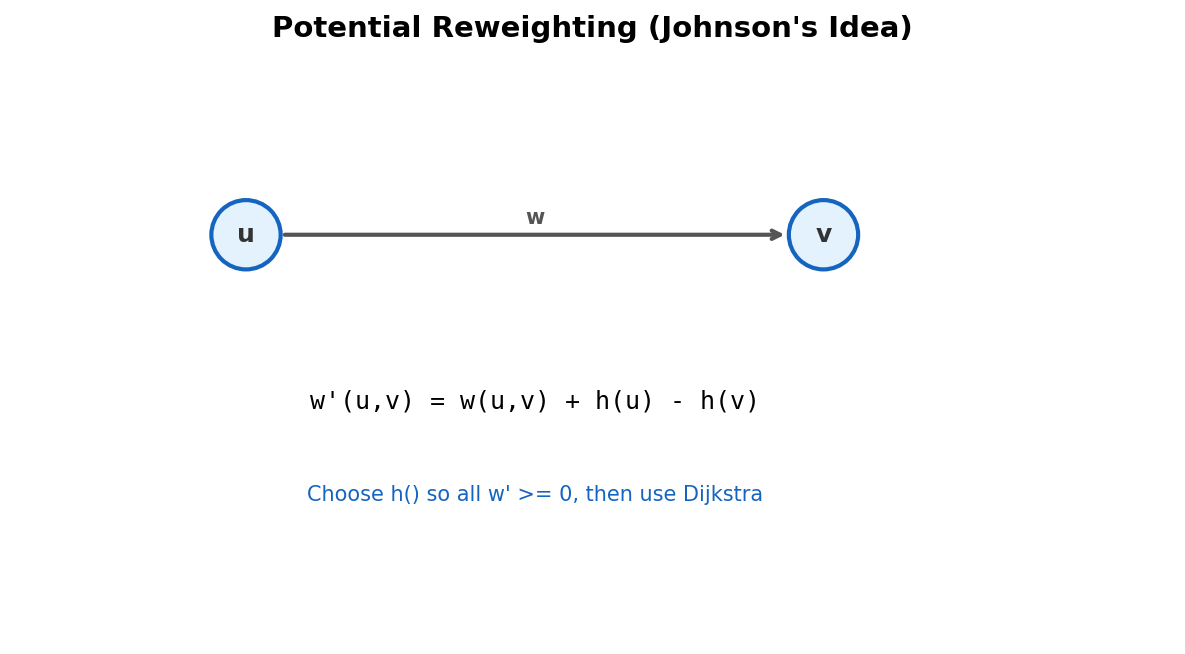
The Reweighting Formula
Choose a potential function \(h(v)\) for each node \(v\). Define the new weight:
Two critical properties:
-
Path costs shift predictably. For any path \(s \to v_1 \to v_2 \to \cdots \to t\), the reweighted cost equals the original cost plus \(h(s) - h(t)\). The intermediate potentials telescope and cancel.
-
Shortest paths don't change. Since \(h(s) - h(t)\) is the same for ALL paths from \(s\) to \(t\), the path with minimum original cost also has minimum reweighted cost.
After running Dijkstra on the reweighted graph:
⚠ Gotcha. The potential function must make ALL edges non-negative. If \(w'(u,v) < 0\) for any edge, Dijkstra still fails. Choosing the right \(h\) is the art.
AtCoder abc237_e — Skiing
Problem. \(N\) plazas connected by \(M\) slopes. Plaza \(i\) has height \(h_i\). Each slope connects plazas \(u\) and \(v\) (bidirectional). Moving from \(u\) to \(v\):
- Downhill (\(h_u \geq h_v\)): gain fun equal to \(h_u - h_v\).
- Uphill (\(h_u < h_v\)): lose fun equal to \(2 \times (h_v - h_u)\).
Start at plaza 1. Maximize total fun. Fun can be negative.
Reformulating as Shortest Path
Maximizing fun = minimizing negative fun = minimizing cost where:
- Downhill edge \(u \to v\): cost \(= -(h_u - h_v)\) (negative — we gain).
- Uphill edge \(u \to v\): cost \(= 2(h_v - h_u)\) (positive — we lose).
This graph has negative edges. Dijkstra fails directly.
Applying the Potential Function
Set \(h(v) = \text{height of plaza } v\) as the potential. Reweight each edge:
Downhill (\(h_u \geq h_v\)):
Uphill (\(h_u < h_v\)):
Both are \(\geq 0\). Dijkstra works on the reweighted graph.
💡 Key insight. The heights themselves are the perfect potential function. Downhill edges become free (cost 0). Uphill edges keep a reduced but non-negative cost. The physics of the problem hands you the potential on a platter.
Full Trace
5 plazas, heights: \(h = [10, 5, 3, 0, 8]\). Edges: \(1{-}2\), \(2{-}3\), \(3{-}4\), \(2{-}5\).
Original edge costs (both directions):
| Edge | Type | Original Cost | Reweighted \(w'\) |
|---|---|---|---|
| 1 \(\to\) 2 | downhill | \(-(10-5)=-5\) | \(-5+10-5=0\) |
| 2 \(\to\) 1 | uphill | \(2(10-5)=10\) | \(10+5-10=5\) |
| 2 \(\to\) 3 | downhill | \(-(5-3)=-2\) | \(-2+5-3=0\) |
| 3 \(\to\) 2 | uphill | \(2(5-3)=4\) | \(4+3-5=2\) |
| 3 \(\to\) 4 | downhill | \(-(3-0)=-3\) | \(-3+3-0=0\) |
| 4 \(\to\) 3 | uphill | \(2(3-0)=6\) | \(6+0-3=3\) |
| 2 \(\to\) 5 | uphill | \(2(8-5)=6\) | \(6+5-8=3\) |
| 5 \(\to\) 2 | downhill | \(-(8-5)=-3\) | \(-3+8-5=0\) |
Dijkstra from plaza 1 on reweighted graph:
| Step | Pop \((d', u)\) | dist'[] after relaxation |
|---|---|---|
| Init | — | \([0, \infty, \infty, \infty, \infty]\) |
| 1 | \((0, 1)\) | \([0, 0, \infty, \infty, \infty]\) |
| 2 | \((0, 2)\) | \([0, 0, 0, \infty, 3]\) |
| 3 | \((0, 3)\) | \([0, 0, 0, 0, 3]\) |
| 4 | \((0, 4)\) | \([0, 0, 0, 0, 3]\) |
| 5 | \((3, 5)\) | \([0, 0, 0, 0, 3]\) |
Convert back: \(\text{real\_dist}[v] = \text{dist}'[v] - h[1] + h[v]\)
| Plaza \(v\) | \(h[v]\) | \(\text{dist}'[v]\) | \(\text{real\_dist}[v]\) | Fun \(= -\text{real}\) |
|---|---|---|---|---|
| 1 | 10 | 0 | \(0 - 10 + 10 = 0\) | 0 |
| 2 | 5 | 0 | \(0 - 10 + 5 = -5\) | 5 |
| 3 | 3 | 0 | \(0 - 10 + 3 = -7\) | 7 |
| 4 | 0 | 0 | \(0 - 10 + 0 = -10\) | 10 |
| 5 | 8 | 3 | \(3 - 10 + 8 = 1\) | \(-1\) |
Answer: 10. Ski all the way downhill from plaza 1 (height 10) to plaza 4 (height 0), gaining 10 fun. Going to plaza 5 requires climbing uphill from 2, which kills your fun.
Solution
#include <bits/stdc++.h>
using namespace std;
int main() {
int N, M;
cin >> N >> M;
vector<long long> h(N + 1);
for (int i = 1; i <= N; i++) cin >> h[i];
vector<vector<pair<int,long long>>> adj(N + 1);
for (int i = 0; i < M; i++) {
int u, v;
cin >> u >> v;
// Reweighted costs
long long w_uv, w_vu;
if (h[u] >= h[v]) {
w_uv = 0; // downhill: free
w_vu = h[u] - h[v]; // uphill: reduced cost
} else {
w_uv = h[v] - h[u];
w_vu = 0;
}
adj[u].push_back({v, w_uv});
adj[v].push_back({u, w_vu});
}
// Dijkstra from node 1
vector<long long> dist(N + 1, LLONG_MAX);
dist[1] = 0;
priority_queue<pair<long long,int>,
vector<pair<long long,int>>,
greater<>> pq;
pq.push({0, 1});
while (!pq.empty()) {
auto [d, u] = pq.top(); pq.pop();
if (d > dist[u]) continue;
for (auto [v, w] : adj[u]) {
if (dist[u] + w < dist[v]) {
dist[v] = dist[u] + w;
pq.push({dist[v], v});
}
}
}
// Answer: max over all v of (h[1] - h[v] - dist'[v])
long long ans = 0;
for (int v = 1; v <= N; v++) {
if (dist[v] < LLONG_MAX) {
ans = max(ans, h[1] - h[v] - dist[v]);
}
}
cout << ans << endl;
}
Johnson's Algorithm: The General Case
The Skiing problem handed us the perfect potential (heights). What if there's no natural potential?
Johnson's algorithm for all-pairs shortest paths:
- Add a virtual node \(s\) with zero-weight edges to all real nodes.
- Run Bellman-Ford from \(s\). Set \(h(v) = \text{dist}(s, v)\).
- Reweight: \(w'(u,v) = w(u,v) + h(u) - h(v)\).
- Run Dijkstra from each node on the reweighted graph.
- Adjust: \(\text{real\_dist}[u][v] = \text{dijkstra\_dist}[u][v] - h(u) + h(v)\).
Why does this work? The triangle inequality of shortest paths guarantees \(h(v) \leq h(u) + w(u,v)\). Rearranging: \(w'(u,v) = w(u,v) + h(u) - h(v) \geq 0\). Every reweighted edge is non-negative.
Time: \(O(VE)\) for Bellman-Ford + \(O(V(V+E) \log V)\) for \(V\) Dijkstra runs. Beats Floyd-Warshall's \(O(V^3)\) on sparse graphs.
💡 Key insight. Bellman-Ford's shortest-path distances satisfy the triangle inequality by definition. That's exactly what makes them a valid potential function. The math is circular in the most elegant way.
LC 1631 — Path With Minimum Effort
Problem. A 2D grid of heights. Moving from cell \((r_1, c_1)\) to adjacent \((r_2, c_2)\) costs \(|h[r_1][c_1] - h[r_2][c_2]|\). Find the path from top-left to bottom-right that minimizes the maximum edge cost along the path.
This isn't a sum-of-weights problem — it's a minimax path. But the height-based cost structure connects to our theme.
Solution. Dijkstra with a twist: instead of summing costs, take the max. The priority queue stores (max_effort_so_far, cell). Relaxation uses max instead of addition.
int dr[] = {-1, 1, 0, 0}, dc[] = {0, 0, -1, 1};
vector<vector<int>> effort(R, vector<int>(C, INT_MAX));
effort[0][0] = 0;
priority_queue<tuple<int,int,int>,
vector<tuple<int,int,int>>,
greater<>> pq;
pq.push({0, 0, 0});
while (!pq.empty()) {
auto [e, r, c] = pq.top(); pq.pop();
if (e > effort[r][c]) continue;
for (int k = 0; k < 4; k++) {
int nr = r + dr[k], nc = c + dc[k];
if (nr < 0 || nr >= R || nc < 0 || nc >= C) continue;
int ne = max(e, abs(heights[r][c] - heights[nr][nc]));
if (ne < effort[nr][nc]) {
effort[nr][nc] = ne;
pq.push({ne, nr, nc});
}
}
}
return effort[R-1][C-1];
No potential function needed — absolute values are already non-negative. But notice the pattern: edge costs derived from node heights. In Skiing, the heights created negative edges that needed reweighting. Here, the absolute value keeps everything non-negative naturally.
When to Reach for Potential Functions
| Signal | Action |
|---|---|
| Negative edges from "gains" or "downhill" | Use natural heights/values as potential |
| All-pairs shortest paths with negative edges | Johnson's algorithm |
| "Maximize gain" along a path | Negate to minimize, reweight to remove negatives |
| Edge weights depend on node properties | Node property is often the potential |
⚠ Gotcha. Potential functions cannot fix negative cycles. If a negative cycle exists, no reweighting can make all edges non-negative. The cycle's total reweighted cost equals its original cost (the potentials telescope and cancel around the cycle). Bellman-Ford detects negative cycles; Dijkstra with potentials does not.
Exercises
-
Verify the telescoping. For a path \(1 \to 3 \to 5 \to 2\) with potential \(h\), expand \(w'(1,3) + w'(3,5) + w'(5,2)\) and confirm it equals \(w(1,3) + w(3,5) + w(5,2) + h(1) - h(2)\).
-
Bad potential. If you set \(h(v) = 0\) for all \(v\), what happens to the reweighted edges? Is this useful?
-
Negative cycle. Construct a 3-node graph with a negative cycle. Show that reweighting with Bellman-Ford potentials preserves the negative cycle. What does Bellman-Ford report?
Problems
| Problem | Link | Difficulty |
|---|---|---|
| AtCoder abc237_e — Skiing | atcoder.jp/contests/abc237/tasks/abc237_e | Hard |
| LC 1631 — Path With Minimum Effort | leetcode.com/problems/path-with-minimum-effort | Medium |